Page Not Found
Page not found. Your pixels are in another canvas.

A list of all the posts and pages found on the site. For you robots out there is an XML version available for digesting as well.
Page not found. Your pixels are in another canvas.
About me
This is a page not in th emain menu
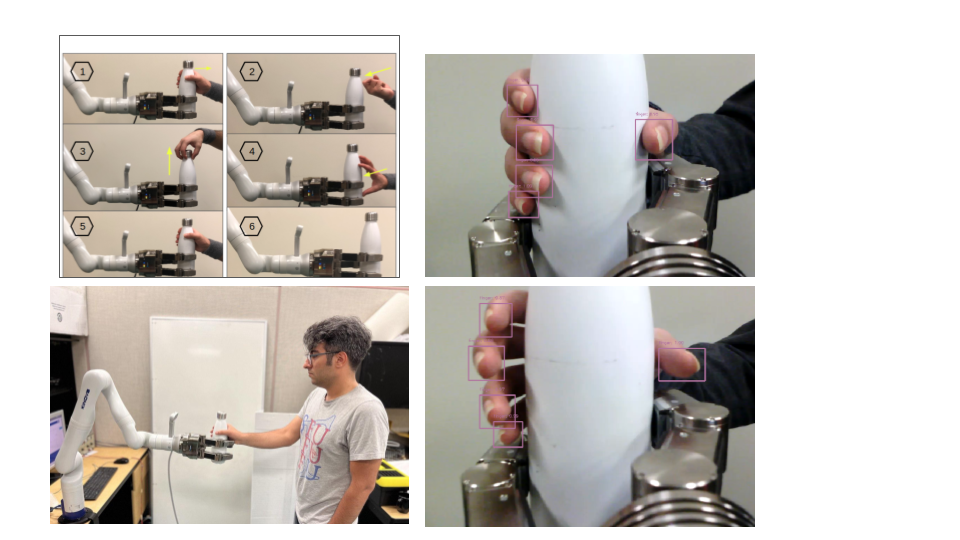
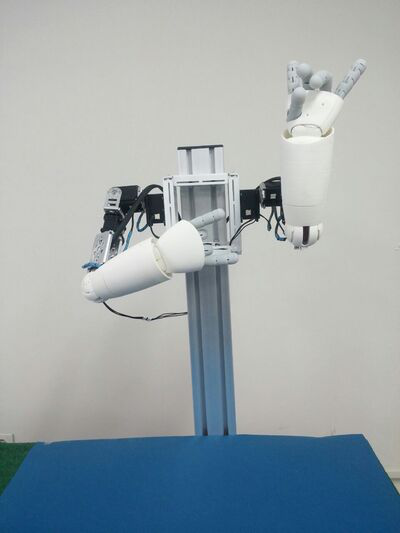
Published in Robot Intelligence Technology and Applications 7. RiTA 2022, 2023
We present a robot-to-human object handover algorithm and implement it on a 7-DOF arm equipped with a 3-finger mechanical hand. The system performs a fully autonomous and robust object handover to a human receiver in real-time. Our algorithm relies on two complementary sensor modalities: joint torque sensors on the arm and an eye-in-hand RGB-D camera for sensor feedback. Our approach is entirely implicit, i.e., there is no explicit communication between the robot and the human receiver. Information obtained via the aforementioned sensor modalities are used as inputs to their related deep neural networks. While the torque sensor network detects the human receiver’s “intention” such as: pull, hold, or bump, the vision sensor network detects if the receiver’s fingers have wrapped around the object. Networks’ outputs are then fused, based on which a decision is made to either release the object or not. Despite substantive challenges in sensor feedback synchronization, object and human hand detection, our system achieves robust robot-to-human handover with 98% accuracy in our preliminary real experiments using human receivers.
Recommended citation: https://link.springer.com/chapter/10.1007/978-3-031-26889-2_11
Undergraduate course, Sharif University of Technology, Mechanical Engineering Department, 2018
Undergraduate/Graduate course, Simon Fraser University, Engineering Science Department, 2020
Undergraduate/Graduate course, Simon Fraser University, Computing Science Department, 2022
Undergraduate/Graduate course, Simon Fraser University, Engineering Science Department, 2022